Марсоход учится плавать по песку у пустынной ящерицы
Обновлено:
Песчаная рыбка — небольшая ящерица из Сахары — умеет буквально нырять в песок и плыть сквозь него, уходя от хищников или преследуя добычу. Теперь этот природный трюк вдохновил инженеров на создание принципиально нового типа марсохода. Исследователи из Вюрцбургского университета разработали колёса, которые не катятся, а «плывут» по песчаному грунту — подобно тому, как это делает ящерица.
Проект ведётся под руководством профессора Марко Шмидта с кафедры встроенных систем и датчиков Вюрцбургского университета совместно с коллегами из Бремена. Работа входит в инициативу VaMEx Немецкого аэрокосмического центра.
Проблема, которую решают учёные, хорошо знакома всем, кто следил за марсианскими миссиями. Традиционные колёса марсоходов на мягком грунте легко проскальзывают, проваливаются и застревают. Именно так в 2010 году был потерян ровер Spirit — он намертво увяз в марсианском песке. Новые колёса имитируют движения ящерицы-песчанки: они создают одновременно продольные и поперечные усилия на грунте, буквально «гребя» по нему. На песке марсоход оставляет характерные синусоидальные следы — именно они подтверждают, что механизм «плавания» работает.
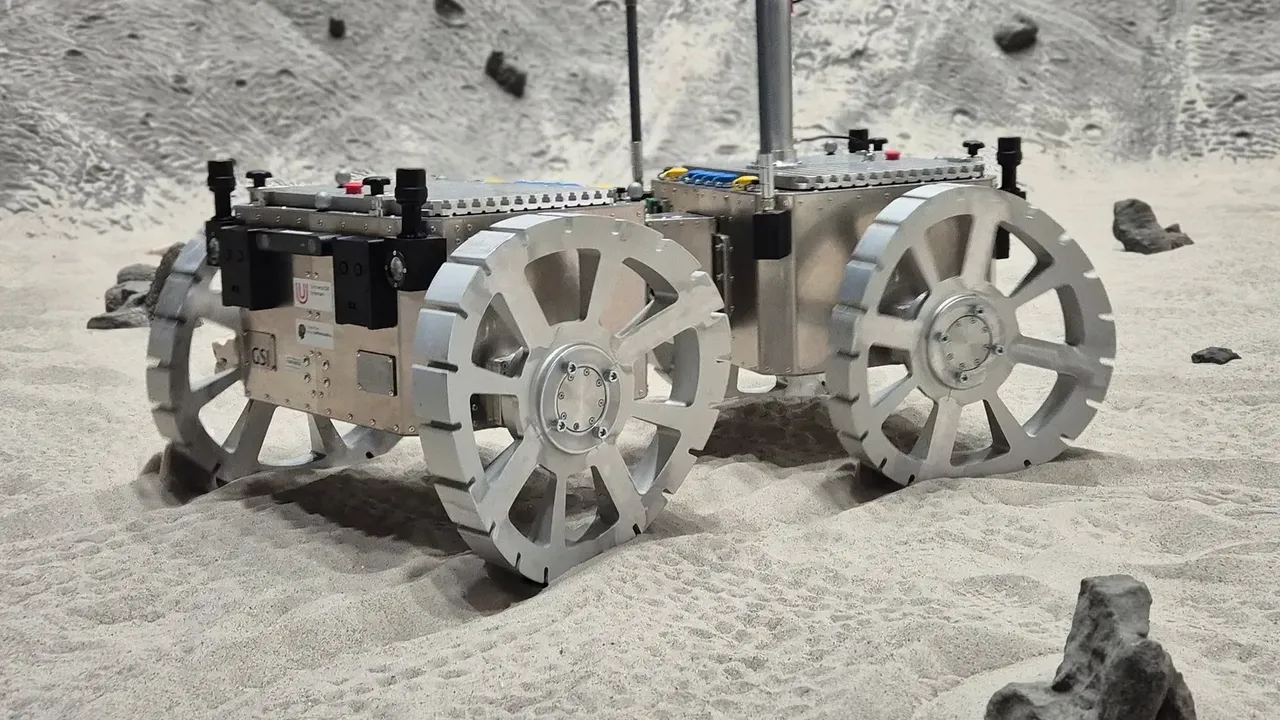
Испытания провели совместно с Немецким исследовательским центром искусственного интеллекта (DFKI) в Бремене и Бременским университетом — как в лаборатории, так и на открытом песчаном полигоне. Аппарат уверенно двигался по сыпучей поверхности, однако эксперименты выявили и слабые места: первые версии колёс оказались тяжелее и уже стандартных пневматических аналогов. Из-за этого давление на грунт было слишком высоким — ровер начинал одновременно проскальзывать и погружаться, что ухудшало управляемость.
Решение нашлось в доработке конструкции: колёса сделали шире и легче. Давление на грунт снизилось, проскальзывание уменьшилось, а устойчивость и управляемость заметно улучшились. Исследователи уверены, что дальнейшая оптимизация профиля колёс ещё больше повысит проходимость на смешанном рельефе.
Параллельно команда работает над «умным» управлением движением. Планируется разработать алгоритмы, которые будут в режиме реального времени учитывать проскальзывание, погружение и характер взаимодействия колеса с грунтом. Это позволит марсоходу самостоятельно адаптироваться к рельефу, не застревая в песчаных ловушках.











